مختلف قسم کی موٹروں کے درمیان فرق
1. DC اور AC موٹرز کے درمیان فرق
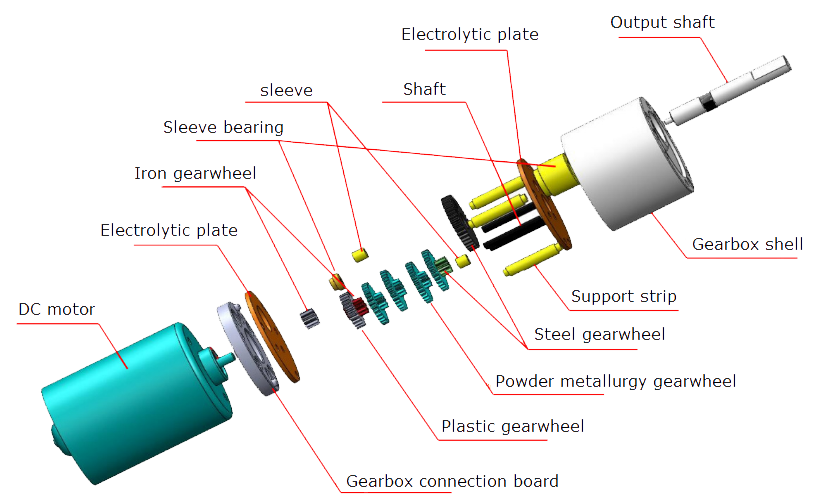
ڈی سی موٹر ساخت کا خاکہ
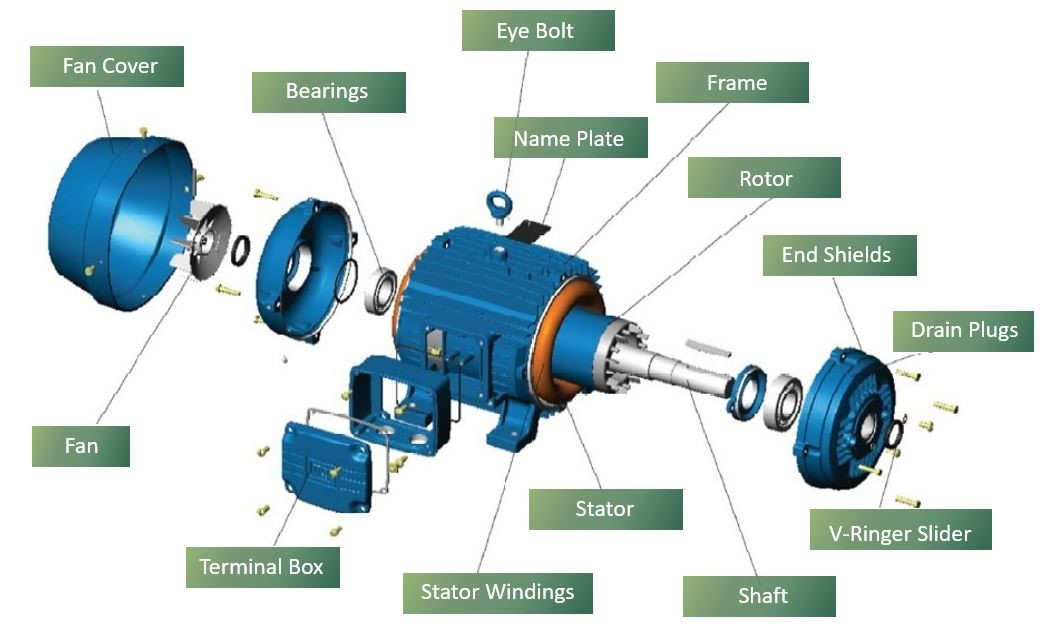
AC موٹر ساخت کا خاکہ
ڈی سی موٹرز براہ راست کرنٹ کو اپنے پاور سورس کے طور پر استعمال کرتی ہیں، جبکہ AC موٹرز الٹرنیٹنگ کرنٹ کو اپنے پاور سورس کے طور پر استعمال کرتی ہیں۔
ساختی طور پر، ڈی سی موٹرز کا اصول نسبتاً آسان ہے، لیکن ساخت پیچیدہ ہے اور اسے برقرار رکھنا آسان نہیں ہے۔ اے سی موٹرز کا اصول پیچیدہ ہے لیکن ساخت نسبتاً آسان ہے، اور ڈی سی موٹرز کے مقابلے میں اسے برقرار رکھنا آسان ہے۔
قیمت کے لحاظ سے، ایک ہی طاقت کے ساتھ ڈی سی موٹرز AC موٹرز سے زیادہ ہیں. اسپیڈ کنٹرول ڈیوائس سمیت ڈی سی کی قیمت AC سے زیادہ ہے۔ بلاشبہ، ساخت اور دیکھ بھال میں بھی بہت بڑا فرق ہے۔
کارکردگی کے لحاظ سے، کیونکہ DC موٹرز کی رفتار مستحکم ہے اور رفتار کا کنٹرول بالکل درست ہے، جو AC موٹرز کے ذریعے حاصل نہیں کیا جا سکتا، اس لیے DC موٹرز کو AC موٹرز کی بجائے سخت رفتار کی ضروریات کے تحت استعمال کرنا پڑتا ہے۔
AC موٹرز کی رفتار کا ضابطہ نسبتاً پیچیدہ ہے، لیکن یہ وسیع پیمانے پر استعمال ہوتا ہے کیونکہ کیمیائی پلانٹس AC پاور استعمال کرتے ہیں۔
2. ہم وقت ساز اور غیر مطابقت پذیر موٹرز کے درمیان فرق
اگر روٹر اسٹیٹر کی رفتار سے گھومتا ہے تو اسے ہم وقت ساز موٹر کہا جاتا ہے۔ اگر وہ ایک جیسے نہیں ہیں تو اسے غیر مطابقت پذیر موٹر کہا جاتا ہے۔
3. عام اور متغیر فریکوئنسی موٹرز کے درمیان فرق
سب سے پہلے، عام موٹرز کو متغیر فریکوئنسی موٹرز کے طور پر استعمال نہیں کیا جا سکتا۔ عام موٹرز کو مستقل فریکوئنسی اور مستقل وولٹیج کے مطابق ڈیزائن کیا گیا ہے، اور فریکوئنسی کنورٹر کی رفتار کے ضابطے کی ضروریات کو مکمل طور پر ڈھالنا ناممکن ہے، اس لیے انہیں متغیر فریکوئنسی موٹرز کے طور پر استعمال نہیں کیا جا سکتا۔
موٹرز پر فریکوئنسی کنورٹرز کا اثر بنیادی طور پر موٹروں کی کارکردگی اور درجہ حرارت میں اضافے پر ہوتا ہے۔
فریکوئنسی کنورٹر آپریشن کے دوران ہارمونک وولٹیج اور کرنٹ کی مختلف ڈگریاں پیدا کر سکتا ہے، تاکہ موٹر غیر سائنوسائیڈل وولٹیج اور کرنٹ کے تحت چل سکے۔ اس میں ہائی آرڈر ہارمونکس موٹر اسٹیٹر کاپر کا نقصان، روٹر کاپر کا نقصان، لوہے کا نقصان اور اضافی نقصان کا سبب بنے گا۔
ان میں سے سب سے اہم روٹر کاپر کا نقصان ہے۔ یہ نقصانات موٹر کو اضافی حرارت پیدا کرنے، کارکردگی کو کم کرنے، آؤٹ پٹ پاور کو کم کرنے اور عام موٹروں کے درجہ حرارت میں عام طور پر 10%-20% اضافہ کرنے کا سبب بنیں گے۔
فریکوئنسی کنورٹر کیریئر کی فریکوئنسی کئی کلو ہرٹز سے لے کر دس کلو ہرٹز تک ہوتی ہے، جس سے موٹر کی سٹیٹر وائنڈنگ بہت زیادہ وولٹیج بڑھنے کی شرح کو برداشت کرتی ہے، جو موٹر پر بہت زیادہ تیز امپلس وولٹیج لگانے کے مترادف ہے، جس سے موٹر کی انٹر ٹرن موصلیت زیادہ سخت امتحان کا مقابلہ کرتی ہے۔
جب عام موٹرز فریکوئنسی کنورٹرز سے چلتی ہیں، تو برقی مقناطیسی، مکینیکل، وینٹیلیشن اور دیگر عوامل کی وجہ سے پیدا ہونے والی کمپن اور شور زیادہ پیچیدہ ہو جائے گا۔
متغیر فریکوئنسی پاور سپلائی میں شامل ہارمونکس موٹر کے برقی مقناطیسی حصے کے موروثی مقامی ہارمونکس میں مداخلت کرتے ہیں، مختلف برقی مقناطیسی حوصلہ افزائی قوتیں بناتے ہیں، اس طرح شور میں اضافہ ہوتا ہے۔
موٹر کی وسیع آپریٹنگ فریکوئنسی رینج اور تیز رفتار تغیر کی حد کی وجہ سے، مختلف برقی مقناطیسی قوت کی لہروں کی تعدد موٹر کے مختلف ساختی حصوں کی موروثی کمپن فریکوئنسیوں سے بچنا مشکل ہے۔
جب بجلی کی فراہمی کی فریکوئنسی کم ہوتی ہے، تو پاور سپلائی میں ہائی آرڈر ہارمونکس کی وجہ سے ہونے والا نقصان بڑا ہوتا ہے۔ دوم، جب متغیر موٹر کی رفتار کم ہو جاتی ہے، تو ٹھنڈک ہوا کا حجم رفتار کے مکعب کے براہ راست تناسب میں کم ہو جاتا ہے، جس کے نتیجے میں موٹر کی حرارت ختم نہیں ہوتی، درجہ حرارت میں تیزی سے اضافہ ہوتا ہے، اور مسلسل ٹارک آؤٹ پٹ حاصل کرنا مشکل ہوتا ہے۔
4. عام موٹرز اور متغیر فریکوئنسی موٹرز کے درمیان ساختی فرق
01. اعلی موصلیت کی سطح کی ضروریات
عام طور پر، متغیر فریکوئنسی موٹرز کی موصلیت کی سطح F یا اس سے زیادہ ہوتی ہے۔ زمین کی موصلیت اور تار کے موڑ کی موصلیت کو مضبوط کیا جانا چاہئے، اور خاص طور پر امپلس وولٹیج کو برداشت کرنے کی موصلیت کی صلاحیت پر غور کیا جانا چاہئے۔
02. متغیر فریکوئنسی موٹرز کے لیے زیادہ کمپن اور شور کی ضروریات
متغیر فریکوئنسی موٹرز کو موٹر کے اجزاء اور پورے کی سختی پر مکمل غور کرنا چاہیے، اور ہر قوت کی لہر کے ساتھ گونج سے بچنے کے لیے اپنی قدرتی تعدد کو بڑھانے کی کوشش کرنی چاہیے۔
03. متغیر فریکوئنسی موٹرز کے لیے ٹھنڈک کے مختلف طریقے
متغیر فریکوئنسی موٹرز عام طور پر جبری وینٹیلیشن کولنگ کا استعمال کرتی ہیں، یعنی مرکزی موٹر کولنگ فین ایک آزاد موٹر سے چلایا جاتا ہے۔
04. مختلف حفاظتی اقدامات کی ضرورت ہے۔
160KW سے زیادہ کی گنجائش والی متغیر فریکوئنسی موٹرز کے لیے بیئرنگ موصلیت کے اقدامات کو اپنایا جانا چاہیے۔ یہ بنیادی طور پر مقناطیسی سرکٹ کی توازن اور شافٹ کرنٹ پیدا کرنا آسان ہے۔ جب دیگر اعلی تعدد اجزاء کے ذریعے پیدا ہونے والا کرنٹ ملایا جاتا ہے تو شافٹ کرنٹ بہت بڑھ جائے گا، جس کے نتیجے میں نقصان پہنچتا ہے، اس لیے عام طور پر موصلیت کے اقدامات کیے جاتے ہیں۔ مستقل پاور متغیر فریکوئنسی موٹرز کے لیے، جب رفتار 3000/منٹ سے زیادہ ہو جائے تو بیئرنگ کے درجہ حرارت میں اضافے کی تلافی کے لیے خصوصی اعلی درجہ حرارت مزاحم چکنائی کا استعمال کیا جانا چاہیے۔
05. مختلف کولنگ سسٹم
متغیر فریکوئنسی موٹر کولنگ فین مستقل ٹھنڈک کی صلاحیت کو یقینی بنانے کے لیے ایک آزاد بجلی کی فراہمی کا استعمال کرتا ہے۔
2. موٹرز کا بنیادی علم
موٹر کا انتخاب
موٹر کے انتخاب کے لیے درکار بنیادی مواد یہ ہیں:
بوجھ سے چلنے والی قسم، ریٹیڈ پاور، ریٹیڈ وولٹیج، شرح شدہ رفتار، اور دیگر حالات۔
لوڈ کی قسم · ڈی سی موٹر · غیر مطابقت پذیر موٹر · مطابقت پذیر موٹر
مستحکم بوجھ کے ساتھ مسلسل پیداواری مشینری کے لیے اور شروع کرنے اور بریک لگانے کے لیے کوئی خاص ضرورت نہیں، مستقل مقناطیس ہم وقت ساز موٹرز یا عام گلہری کیج غیر مطابقت پذیر موٹرز کو ترجیح دی جانی چاہیے، جو مشینری، واٹر پمپ، پنکھے وغیرہ میں بڑے پیمانے پر استعمال ہوتی ہیں۔
بار بار شروع کرنے اور بریک لگانے والی اور بڑے اسٹارٹنگ اور بریکنگ ٹارک کی ضرورت والی پروڈکشن مشینری کے لیے، جیسے برج کرینز، مائن ہوسٹس، ایئر کمپریسرز، ناقابل واپسی رولنگ ملز وغیرہ، مستقل مقناطیس ہم وقت ساز موٹرز یا زخم کی غیر مطابقت پذیر موٹرز استعمال کی جانی چاہئیں۔
سپیڈ ریگولیشن کے تقاضوں کے بغیر مواقع کے لیے، جہاں مستقل رفتار کی ضرورت ہو یا پاور فیکٹر کو بہتر کرنے کی ضرورت ہو، مستقل مقناطیس ہم وقت ساز موٹرز استعمال کی جانی چاہئیں، جیسے درمیانی اور بڑی صلاحیت والے واٹر پمپ، ایئر کمپریسرز، ہوائیسٹ، ملز وغیرہ۔
ایسی پیداواری مشینری کے لیے جو 1:3 سے زیادہ رفتار کے ضابطے کی حد کی ضرورت ہوتی ہے اور جس کے لیے مسلسل، مستحکم اور ہموار رفتار کے ضابطے کی ضرورت ہوتی ہے، یہ مشورہ دیا جاتا ہے کہ مستقل مقناطیس ہم وقت ساز موٹرز یا الگ سے پرجوش DC موٹرز یا اسکوائرل کیج غیر مطابقت پذیر موٹرز کو متغیر فریکوئنسی اسپیڈ ریگولیشن کے ساتھ استعمال کیا جائے، جیسے کہ بڑے پیمانے پر مشینوں، مشینوں، مشینوں، مشینوں کے لیے۔ لہرانے، وغیرہ
عام طور پر، موٹر کا اندازہ موٹے طور پر چلنے والے لوڈ کی قسم، ریٹیڈ پاور، ریٹیڈ وولٹیج، اور موٹر کی شرح شدہ رفتار فراہم کرکے کیا جاسکتا ہے۔
تاہم، اگر بوجھ کی ضروریات کو بہتر طریقے سے پورا کیا جانا ہے، تو یہ بنیادی پیرامیٹرز کافی نہیں ہیں۔
دیگر پیرامیٹرز جن کو فراہم کرنے کی ضرورت ہے ان میں شامل ہیں: فریکوئنسی، ورکنگ سسٹم، اوورلوڈ کی ضروریات، موصلیت کی سطح، تحفظ کی سطح، جمود کا لمحہ، لوڈ ریزسٹنس ٹارک وکر، انسٹالیشن کا طریقہ، محیط درجہ حرارت، اونچائی، بیرونی ضروریات، وغیرہ (مخصوص حالات کے مطابق فراہم کردہ)
3. موٹرز کا بنیادی علم
موٹر کے انتخاب کے لیے اقدامات
جب موٹر چل رہی ہو یا ناکام ہو جائے تو موٹر کے محفوظ آپریشن کو یقینی بنانے کے لیے دیکھنے، سننے، سونگھنے اور چھونے کے چار طریقے استعمال کیے جا سکتے ہیں تاکہ خرابی کو بروقت روکا جا سکے۔
1. دیکھو
مشاہدہ کریں کہ آیا موٹر کے آپریشن کے دوران کوئی غیر معمولی چیزیں ہیں، جو بنیادی طور پر درج ذیل حالات میں ظاہر ہوتی ہیں۔
1. جب سٹیٹر وائنڈنگ شارٹ سرکٹ ہو تو آپ موٹر سے دھواں نکلتا دیکھ سکتے ہیں۔
2. جب موٹر سنجیدگی سے اوورلوڈ ہو جائے یا فیز کے نقصان میں چل رہی ہو، رفتار کم ہو جائے گی اور ایک بھاری "گونجنے والی" آواز آئے گی۔
3. جب موٹر عام طور پر چل رہی ہو، لیکن اچانک رک جائے، آپ کو ڈھیلے کنکشن سے چنگاریاں نکلتی نظر آئیں گی۔ فیوز اڑا ہوا ہے یا کوئی حصہ پھنس گیا ہے۔
4. اگر موٹر پرتشدد طریقے سے ہلتی ہے، تو یہ ہو سکتا ہے کہ ٹرانسمیشن ڈیوائس پھنس گئی ہو یا موٹر اچھی طرح سے ٹھیک نہ ہو، پاؤں کے بولٹ ڈھیلے ہوں، وغیرہ۔
5. اگر موٹر کے اندر رابطہ پوائنٹس اور کنکشنز پر رنگت، جلنے کے نشانات اور دھوئیں کے نشانات ہیں، تو اس کا مطلب ہے کہ مقامی حد سے زیادہ گرم ہونا، کنڈکٹر کے کنکشن پر خراب رابطہ یا سمیٹ جل جانا وغیرہ ہو سکتا ہے۔
2. سنو
جب موٹر عام طور پر چل رہی ہو، تو اسے یکساں اور ہلکی "buzzing" آواز خارج کرنی چاہیے، بغیر شور اور خاص آوازوں کے۔
اگر شور بہت زیادہ ہے، بشمول برقی مقناطیسی شور، بیئرنگ شور، وینٹیلیشن شور، مکینیکل رگڑ شور، وغیرہ، یہ ایک پیشرو یا غلطی کا رجحان ہوسکتا ہے۔
1. برقی مقناطیسی شور کے لیے، اگر موٹر اونچی، نیچی اور بھاری آواز نکالتی ہے، تو اس کی وجوہات درج ذیل ہو سکتی ہیں:
(1) سٹیٹر اور روٹر کے درمیان ہوا کا فرق ناہموار ہے۔ اس وقت، آواز اونچی اور نیچی ہوتی ہے، اور اونچی اور نیچی آوازوں کے درمیان وقفہ برقرار رہتا ہے۔ یہ بیئرنگ پہننے کی وجہ سے ہوتا ہے، جو سٹیٹر اور روٹر کو غیر مرتکز بناتا ہے۔
(2) تھری فیز کرنٹ غیر متوازن ہے۔ یہ تھری فیز وائنڈنگ کے غلط طریقے سے گراؤنڈ ہونے، شارٹ سرکٹ یا خراب رابطہ ہونے کی وجہ سے ہوتا ہے۔ اگر آواز بہت مدھم ہے، تو اس کا مطلب ہے کہ موٹر سنجیدگی سے اوورلوڈ ہے یا فیز غائب طریقے سے چل رہی ہے۔
(3) لوہے کا کور ڈھیلا ہے۔ موٹر کے آپریشن کے دوران، وائبریشن کی وجہ سے آئرن کور فکسنگ بولٹ ڈھیلے ہو جاتے ہیں، جس کی وجہ سے آئرن کور سلیکون سٹیل شیٹ ڈھیلی ہو جاتی ہے اور شور ہوتا ہے۔
2. شور برداشت کرنے کے لیے، آپ کو موٹر کے آپریشن کے دوران اس کی کثرت سے نگرانی کرنی چاہیے۔ نگرانی کا طریقہ یہ ہے: سکریو ڈرایور کے ایک سرے کو بیئرنگ انسٹالیشن والے حصے کے خلاف اور دوسرے سرے کو اپنے کان کے قریب رکھیں، اور آپ بیئرنگ کے چلنے کی آواز سن سکتے ہیں۔ اگر بیئرنگ عام طور پر چلتی ہے، تو آواز ایک مسلسل اور باریک "سرسراتی" آواز ہے، بغیر کسی اتار چڑھاؤ یا دھاتی رگڑ کی آوازوں کے۔
اگر درج ذیل آوازیں آتی ہیں، تو یہ ایک غیر معمولی رجحان ہے:
(1) جب بیئرنگ چل رہا ہوتا ہے تو ایک "چیخنے" کی آواز آتی ہے۔ یہ دھاتی رگڑ کی آواز ہے، جو عام طور پر بیئرنگ میں تیل کی کمی کی وجہ سے ہوتی ہے۔ بیئرنگ کو الگ کر دینا چاہیے اور مناسب مقدار میں چکنائی ڈالنی چاہیے۔
(2) اگر "چہچہاتی" آواز آتی ہے، تو یہ وہ آواز ہوتی ہے جب گیند گھومتی ہے۔ یہ عام طور پر چکنائی کے خشک ہونے یا تیل کی کمی کی وجہ سے ہوتا ہے۔ چکنائی کی مناسب مقدار شامل کی جا سکتی ہے۔
(3) اگر کوئی "کلک کرنے" یا "چیخنے" کی آواز آتی ہے، تو یہ وہ آواز ہے جو بیئرنگ میں گیند کی بے قاعدہ حرکت سے پیدا ہوتی ہے۔ یہ بیئرنگ میں گیند کے خراب ہونے یا موٹر کے طویل مدتی استعمال نہ کرنے کی وجہ سے ہوتا ہے، جس کے نتیجے میں چکنائی خشک ہو جاتی ہے۔
3. اگر ٹرانسمیشن میکانزم اور کارفرما میکانزم اتار چڑھاؤ والی آواز کے بجائے مسلسل آواز نکالتے ہیں، تو اسے درج ذیل حالات کے مطابق سنبھالا جا سکتا ہے۔
(1) متواتر "پاپ" آواز ناہموار بیلٹ جوائنٹ کی وجہ سے ہوتی ہے۔
(2) متواتر "ڈونگ ڈونگ" آواز جوڑے یا گھرنی اور شافٹ کے درمیان ڈھیلے پن کے ساتھ ساتھ چابی یا کی وے کے پہننے کی وجہ سے ہوتی ہے۔
(3) ناہموار تصادم کی آواز پنکھے کے کور سے بلیڈ کے ٹکرانے کی وجہ سے ہوتی ہے۔
3. بو
موٹر کو سونگھ کر بھی ناکامیوں کا اندازہ لگایا جا سکتا ہے اور اسے روکا جا سکتا ہے۔
جنکشن باکس کو کھولیں اور اسے سونگھ کر دیکھیں کہ جلی ہوئی بو تو نہیں ہے۔ اگر پینٹ کی کوئی خاص بو پائی جاتی ہے، تو اس کا مطلب ہے کہ موٹر کا اندرونی درجہ حرارت بہت زیادہ ہے۔ اگر جلنے کی تیز بو یا جلی ہوئی بو آتی ہے، تو یہ ہو سکتا ہے کہ موصلیت کی تہہ کی بحالی کا جال ٹوٹ گیا ہو یا سمیٹ جل گیا ہو۔
اگر کوئی بو نہیں ہے تو، سمیٹ اور کیسنگ کے درمیان موصلیت کی مزاحمت کی پیمائش کرنے کے لئے ایک میگوہ میٹر کا استعمال کرنا ضروری ہے. اگر یہ 0.5 megohms سے کم ہے تو اسے خشک کرنا ضروری ہے۔ اگر مزاحمت صفر ہے، تو اس کا مطلب ہے کہ اسے نقصان پہنچا ہے۔
4. چھوئے۔
موٹر کے کچھ حصوں کے درجہ حرارت کو چھونے سے بھی خرابی کی وجہ کا تعین کیا جا سکتا ہے۔
حفاظت کو یقینی بنانے کے لیے، موٹر کیسنگ اور بیئرنگ کے آس پاس کے حصوں کو چھونے کے لیے اپنے ہاتھ کے پچھلے حصے کا استعمال کریں۔
اگر درجہ حرارت غیر معمولی ہے تو اس کی وجوہات درج ذیل ہو سکتی ہیں۔
1. خراب وینٹیلیشن۔ جیسے پنکھا گرنا، وینٹیلیشن ڈکٹ کا بلاک ہونا وغیرہ۔
2. اوورلوڈ۔ کرنٹ بہت بڑا ہے اور سٹیٹر وائنڈنگ زیادہ گرم ہے۔
3. سٹیٹر وائنڈنگ موڑ شارٹ سرکٹڈ ہیں یا تھری فیز کرنٹ غیر متوازن ہے۔
4. بار بار شروع کرنا یا بریک لگانا۔
5. اگر بیئرنگ کے ارد گرد درجہ حرارت بہت زیادہ ہے، تو یہ بیئرنگ کو پہنچنے والے نقصان یا تیل کی کمی کی وجہ سے ہوسکتا ہے۔
موٹر بیئرنگ درجہ حرارت کے ضوابط، اسامانیتاوں کی وجوہات اور علاج
ضوابط میں کہا گیا ہے کہ رولنگ بیرنگ کا زیادہ سے زیادہ درجہ حرارت 95 ℃ سے زیادہ نہیں ہونا چاہیے، اور سلائیڈنگ بیرنگ کا زیادہ سے زیادہ درجہ حرارت 80 ℃ سے زیادہ نہیں ہونا چاہیے۔ اور درجہ حرارت میں اضافہ 55 ℃ سے زیادہ نہیں ہونا چاہئے (درجہ حرارت میں اضافہ ٹیسٹ کے دوران محیطی درجہ حرارت کو منفی درجہ حرارت ہے)۔
ضرورت سے زیادہ درجہ حرارت میں اضافے کی وجوہات اور علاج:
(1) وجہ: شافٹ جھکا ہوا ہے اور درمیانی لکیر درست نہیں ہے۔ علاج: مرکز دوبارہ تلاش کریں۔
(2) وجہ: بنیاد کے پیچ ڈھیلے ہیں۔ علاج: فاؤنڈیشن کے پیچ کو سخت کریں۔
(3) وجہ: چکنا کرنے والا صاف نہیں ہے۔ علاج: چکنا کرنے والے کو تبدیل کریں۔
(4) وجہ: چکنا کرنے والا بہت لمبے عرصے سے استعمال ہو رہا ہے اور اسے تبدیل نہیں کیا گیا ہے۔ علاج: بیرنگ صاف کریں اور چکنا کرنے والے کو تبدیل کریں۔
(5) وجہ: بیئرنگ میں موجود گیند یا رولر کو نقصان پہنچا ہے۔ علاج: بیئرنگ کو نئے سے تبدیل کریں۔
Anhui Mingteng مستقل مقناطیسی مشینری اور برقی آلات کمپنی, لمیٹڈ(https://www.mingtengmotor.com/) نے 17 سال کی تیز رفتار ترقی کا تجربہ کیا ہے۔ کمپنی نے روایتی، متغیر فریکوئنسی، دھماکہ پروف، متغیر فریکوئنسی دھماکہ پروف، ڈائریکٹ ڈرائیو، اور دھماکہ پروف ڈائریکٹ ڈرائیو سیریز میں 2,000 سے زیادہ مستقل مقناطیس موٹرز تیار اور تیار کی ہیں۔ موٹرز کو پنکھے، واٹر پمپ، بیلٹ کنویئرز، بال ملز، مکسر، کرشر، سکریپر، آئل پمپ، اسپننگ مشینوں اور مختلف شعبوں جیسے کان کنی، سٹیل اور بجلی کے دیگر بوجھوں پر کامیابی سے چلایا گیا ہے، توانائی کی بچت کے اچھے اثرات حاصل کر کے وسیع پذیرائی حاصل کر رہے ہیں۔
کاپی رائٹ: یہ مضمون اصل لنک کا دوبارہ پرنٹ ہے:
https://mp.weixin.qq.com/s/hLDTgGlnZDcGe2Jm1oX0Hg
یہ مضمون ہماری کمپنی کے خیالات کی نمائندگی نہیں کرتا ہے۔ اگر آپ کی مختلف آراء یا خیالات ہیں، تو براہ کرم ہمیں درست کریں!
پوسٹ ٹائم: نومبر-01-2024