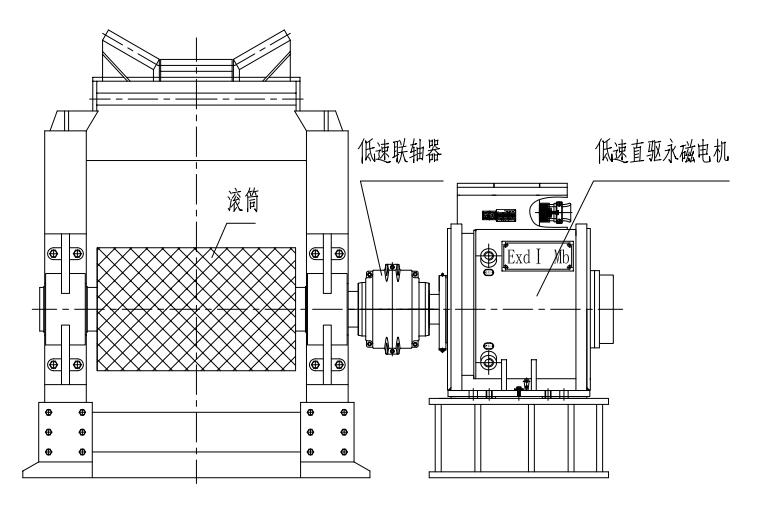
IE5 6000V TYZD کم رفتار ڈائریکٹ ڈرائیو مستقل مقناطیس ہم وقت ساز موٹر کو لوڈ کرتی ہے

مصنوعات کی تفصیلات
| شرح شدہ وولٹیج | 6000V |
| پاور رینج | 200-1400kW |
| رفتار | 0-300rpm |
| تعدد | متغیر تعدد |
| مرحلہ | 3 |
| ڈنڈے | تکنیکی ڈیزائن کی طرف سے |
| فریم کی حد | 630-1000 |
| چڑھنا | B3,B35,V1,V3..... |
| تنہائی کا درجہ | H |
| تحفظ کا درجہ | IP55 |
| ورکنگ ڈیوٹی | S1 |
| اپنی مرضی کے مطابق | جی ہاں |
| پیداوار سائیکل | 30 دن |
| اصل | چین |
مصنوعات کی خصوصیات
• اعلی کارکردگی اور طاقت کا عنصر۔
• مستقل میگنےٹ اتیجیت، اتیجیت موجودہ کی ضرورت نہیں ہے.
• ہم وقت ساز آپریشن، کوئی رفتار پلسشن نہیں ہے.
• اعلی سٹارٹنگ ٹارک اور اوورلوڈ صلاحیت میں ڈیزائن کیا جا سکتا ہے۔
• کم شور، درجہ حرارت میں اضافہ اور کمپن۔
• قابل اعتماد آپریشن۔
• متغیر رفتار ایپلی کیشنز کے لیے فریکوئنسی انورٹر کے ساتھ۔
پروڈکٹ ایپلی کیشنز
سیریز کی مصنوعات مختلف سازوسامان جیسے بال ملز، بیلٹ مشینیں، مکسر، ڈائریکٹ ڈرائیو آئل پمپنگ مشین، پلنگر پمپ، کولنگ ٹاور کے پنکھے، لہرانے وغیرہ میں کوئلے کی کانوں، کانوں، دھات کاری، الیکٹرک پاور، کیمیائی صنعت، تعمیراتی مواد اور دیگر صنعتی اور کان کنی کے اداروں میں بڑے پیمانے پر استعمال ہوتی ہیں۔


اکثر پوچھے گئے سوالات
کم رفتار براہ راست ڈرائیو مستقل مقناطیس موٹرز پر پس منظر؟
انورٹر ٹیکنالوجی کی تازہ کاری اور مستقل مقناطیسی مواد کی ترقی پر انحصار کرتے ہوئے، یہ کم رفتار ڈائریکٹ ڈرائیو مستقل مقناطیس موٹرز کے حصول کی بنیاد فراہم کرتا ہے۔
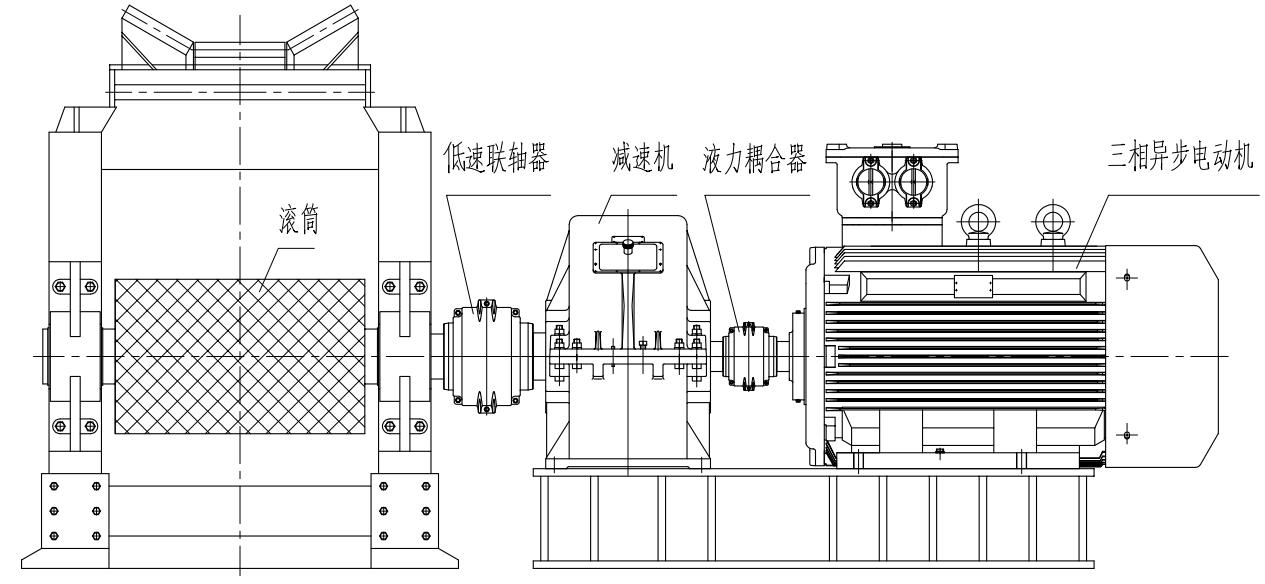
صنعتی اور زرعی پیداوار اور خود کار طریقے سے کنٹرول میں، اکثر کم رفتار ڈرائیو استعمال کرنے کی ضرورت ہے، اس سے پہلے کہ الیکٹرک موٹرز کے علاوہ ریڈوسر اور دیگر سستی کے آلات کا احساس کرنے کے لئے عام استعمال کریں. اگرچہ یہ نظام کم رفتار کا مقصد حاصل کر سکتا ہے۔ لیکن اس میں بہت سی خامیاں بھی ہیں، جیسے کہ پیچیدہ ساخت، بڑا سائز، شور اور کم کارکردگی۔
مستقل مقناطیس ہم وقت ساز موٹر کا اصول اور شروع کرنے کا طریقہ؟
چونکہ اسٹیٹر گھومنے والی مقناطیسی فیلڈ کی رفتار ہم آہنگی کی رفتار ہے، جب کہ روٹر شروع ہونے کے فوراً بعد آرام پر ہے، ہوا کے خلاء کے مقناطیسی میدان اور روٹر کے کھمبوں کے درمیان نسبتاً حرکت ہے، اور ایئر گیپ کا مقناطیسی میدان تبدیل ہو رہا ہے، جو اوسط مطابقت پذیر برقی مقناطیسی ٹارک پیدا نہیں کر سکتا، یعنی کوئی سٹارٹنگ ٹارک نہیں ہے، اس لیے خود ہی موورٹر میں شروع ہونے والا ٹارک ہے۔
شروع ہونے والے مسئلے کو حل کرنے کے لیے، عام طور پر استعمال ہونے والے دیگر طریقے اختیار کیے جائیں:
1، فریکوئنسی کنورژن شروع کرنے کا طریقہ: فریکوئنسی کنورژن پاور سپلائی کا استعمال فریکوئنسی کو آہستہ آہستہ صفر سے بڑھنے کے لیے، گھومنے والا مقناطیسی فیلڈ کرشن روٹر آہستہ آہستہ ہم آہنگ ایکسلریشن جب تک کہ یہ ریٹیڈ اسپیڈ تک نہ پہنچ جائے، شروع کرنا مکمل ہو جاتا ہے۔
2، متضاد شروع کرنے کا طریقہ: شروع ہونے والی سمیٹ کے ساتھ روٹر میں، اس کی ساخت غیر مطابقت پذیر مشین گلہری کیج سمیٹنے کی طرح ہے۔ ہم وقت ساز موٹر سٹیٹر وائنڈنگ پاور سپلائی سے جڑی ہوئی ہے، سٹارٹنگ وائنڈنگ کے کردار کے ذریعے، سٹارٹنگ ٹارک پیدا کرتی ہے، تاکہ ہم وقت ساز موٹر خود سے شروع ہو جائے، جب رفتار ہم وقت ساز رفتار کے 95 فیصد تک ہو جائے تو روٹر خود بخود ہم آہنگی میں کھینچا جاتا ہے۔




